Since the homology group
![]() is
is
![]() , a connected
surface can be situated in
, a connected
surface can be situated in
![]() in two ways: zero-homologous,
and realizing the nontrivial homology class.
in two ways: zero-homologous,
and realizing the nontrivial homology class.
In the first case it divides the projective space into two domains being the boundary for both domains. Hence, the surface divides its tubular neighborhood, i. e. it is two-sided.
In the second case the complement of the surface in the projective space is connected. (If it was not connected, the surface would bound and thereby realize the zero homology class.) Moreover, it is one-sided.
The latter can be proved in many ways. For example, if the surface was
two-sided and its complement was connected, there would exist a
nontrivial infinite cyclic covering of
![]() , which would contradict
the fact that
, which would contradict
the fact that
![]() The infinite cyclic covering could
be constructed by gluing an infinite sequence of copies of
The infinite cyclic covering could
be constructed by gluing an infinite sequence of copies of
![]() cut along the surface: each copy has to be glued along one of
the sides of the cut to the other side of the cut in the next copy.
cut along the surface: each copy has to be glued along one of
the sides of the cut to the other side of the cut in the next copy.
Another proof: take a projective plane, make it transversal to the
surface, and consider the curve which is their intersection. Its
homology class in
![]() is the image of the nontrivial element of
is the image of the nontrivial element of
![]() under the inverse Hopf homomorphism
under the inverse Hopf homomorphism
![]() . This is an isomorphism,
as one can see taking the same construction in the case when the
surface is another projective plane. Thus the intersection is a
one-sided curve in
. This is an isomorphism,
as one can see taking the same construction in the case when the
surface is another projective plane. Thus the intersection is a
one-sided curve in
![]() . Hence the normal fibration of the original
surface in
. Hence the normal fibration of the original
surface in
![]() is not trivial. This means that the surface is
one-sided.
is not trivial. This means that the surface is
one-sided.
A connected surface two-sidedly embedded in
![]() is orientable,
since it bounds a part of the ambient space which is orientable.
Therefore, such a surface is homeomorphic to sphere or to sphere with
handles. There is no restriction to the number of handles: one can take
an embedded sphere bounding a small ball, and adjoin to it any number
of handles.
is orientable,
since it bounds a part of the ambient space which is orientable.
Therefore, such a surface is homeomorphic to sphere or to sphere with
handles. There is no restriction to the number of handles: one can take
an embedded sphere bounding a small ball, and adjoin to it any number
of handles.
A one-sidedly embedded surface is nonorientable. Indeed, its normal
bundle is nonorientable, while the restriction of the tangent bundle
of
![]() to the surface is orientable (since
to the surface is orientable (since
![]() is). The
restriction of the tangent bundle of
is). The
restriction of the tangent bundle of
![]() to the surface is the
Whitney sum of the normal and tangent bundles of the surface. Therefore
it cannot happen that only one of these three bundles is not
orientable.
to the surface is the
Whitney sum of the normal and tangent bundles of the surface. Therefore
it cannot happen that only one of these three bundles is not
orientable.
Contrary to the case of two-sided surfaces, in the case of one-sided surfaces there is an additional restriction on their topological types.
In particular, it is impossible to embed a Klein
bottle to
![]() . (The Euler characteristic of a connected surface
two-sidedly embedded into
. (The Euler characteristic of a connected surface
two-sidedly embedded into
![]() is even, but it follows from
orientability: the Euler characteristic of any closed oriented surface
is even.) By topological classification of closed surfaces,
a nonorientable connected surface with odd Euler characteristic is
homeomorphic to the projective plane or to the projective plane with
handles. Any surface of this sort can be embedded into
is even, but it follows from
orientability: the Euler characteristic of any closed oriented surface
is even.) By topological classification of closed surfaces,
a nonorientable connected surface with odd Euler characteristic is
homeomorphic to the projective plane or to the projective plane with
handles. Any surface of this sort can be embedded into
![]() : for
the projective plane
: for
the projective plane
![]() is the native ambient space, and one can
adjoin to it in
is the native ambient space, and one can
adjoin to it in
![]() any number of handles. We denote a sphere with
any number of handles. We denote a sphere with
![]() handles by
handles by ![]() and a projective plane with
and a projective plane with ![]() handles by
handles by ![]() .
.
Consider the disjoint sum ![]() of the closures of those components of
of the closures of those components of
![]() which are colored with the same color. It
is a compact 3-manifold. It is oriented since each of the components
inherits orientation from
which are colored with the same color. It
is a compact 3-manifold. It is oriented since each of the components
inherits orientation from
![]() . The boundary of this 3-manifold is
composed of pieces of
. The boundary of this 3-manifold is
composed of pieces of ![]() and
and
![]() . It can be thought of as the
result of cutting both surfaces along their intersection curve and
regluing. The intersection curve is replaced by its two copies, while
the rest part of
. It can be thought of as the
result of cutting both surfaces along their intersection curve and
regluing. The intersection curve is replaced by its two copies, while
the rest part of ![]() and
and
![]() does not change. Since the
intersection curve consists of circles, its Euler characteristic is
zero. Therefore
does not change. Since the
intersection curve consists of circles, its Euler characteristic is
zero. Therefore
![]() . On the other
hand,
. On the other
hand,
![]() is even since
is even since
![]() is a closed oriented surface
(
is a closed oriented surface
(
![]() inherits orientation from
inherits orientation from ![]() ). Thus
). Thus ![]() is odd.
is odd.
![]()
A one-sided connected surface in
![]() contains a loop which is not
contractible in
contains a loop which is not
contractible in
![]() . Such a loop can be detected in the following
way: Consider the intersection of the surface with any one-sided
transversal surface (e. g.,
. Such a loop can be detected in the following
way: Consider the intersection of the surface with any one-sided
transversal surface (e. g.,
![]() or a surface obtained from the
original one by a small shift). The homology class of the intersection
curve is the self-intersection of the nonzero element of
or a surface obtained from the
original one by a small shift). The homology class of the intersection
curve is the self-intersection of the nonzero element of
![]() . Since the self-intersection is the nonzero
element of
. Since the self-intersection is the nonzero
element of
![]() , the intersection curve contains a
component noncontractible in
, the intersection curve contains a
component noncontractible in
![]() .
.
A two-sided connected surface in
![]() can contain no loops
noncontractible in
can contain no loops
noncontractible in
![]() (this happens, for instance, if the
surface lies in an affine part of
(this happens, for instance, if the
surface lies in an affine part of
![]() ). Of course, if
a surface contains a loop noncontractible in
). Of course, if
a surface contains a loop noncontractible in
![]() , it is not
contractible in
, it is not
contractible in
![]() itself. Moreover, then it meets any one-sided
surface, since the noncontractible loop realizes the nonzero element of
itself. Moreover, then it meets any one-sided
surface, since the noncontractible loop realizes the nonzero element of
![]() and this element has nonzero intersection number
with the homology class realized by a one-sided surface.
and this element has nonzero intersection number
with the homology class realized by a one-sided surface.
If any loop on a connected surface ![]() embedded in
embedded in
![]() is
contractible in
is
contractible in
![]() (which means that the embedding homomorphism
(which means that the embedding homomorphism
![]() is trivial), then there is no obstruction to
contract the embedding, i. e., to construct a homotopy between the
embedding
is trivial), then there is no obstruction to
contract the embedding, i. e., to construct a homotopy between the
embedding
![]() and a constant map. One
can take a cell decomposition of
and a constant map. One
can take a cell decomposition of ![]() , contract the 1-skeleton
(extending the homotopy to the whole
, contract the 1-skeleton
(extending the homotopy to the whole ![]() ), and then contract the map of
the 2-cell, which is possible, since
), and then contract the map of
the 2-cell, which is possible, since
![]() . A surface of
this sort is called contractible (in
. A surface of
this sort is called contractible (in
![]() ).
).
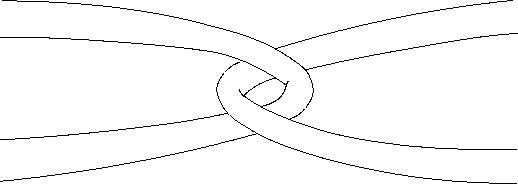
It may happen, however, that there is no isotopy relating the embedding
of a contractible surface with a map to an affine part of
![]() . The simplest example of a contractible torus which cannot be
moved by an isotopy to an affine part of
. The simplest example of a contractible torus which cannot be
moved by an isotopy to an affine part of
![]() is shown in Figure
32.
is shown in Figure
32.
As it was stated above, the complement
![]() of a connected
surface
of a connected
surface ![]() two-sidedly embedded in
two-sidedly embedded in
![]() consists of two connected
components. If
consists of two connected
components. If ![]() is not contractible in
is not contractible in
![]() then both of them
are not contractible, since a loop on
then both of them
are not contractible, since a loop on ![]() noncontractible in
noncontractible in
![]() can be pushed to each of the components. They may be positioned in
can be pushed to each of the components. They may be positioned in
![]() in the same way.
in the same way.
The simplest example of this situation is provided by a one-sheeted
hyperboloid. It is homeomorphic to torus and its complement consists of
two solid tori. So, this is a Heegaard decomposition of
![]() . There
exists an isotopy of
. There
exists an isotopy of
![]() made of projective transformation
exchanging the components.
-
made of projective transformation
exchanging the components.
-
![]() endnoteiii
One-sheeted hyperboloid can be
presented as a parabolic hyperboloid defined by equation
endnoteiii
One-sheeted hyperboloid can be
presented as a parabolic hyperboloid defined by equation ![]() . It is
invariant under rotation by
. It is
invariant under rotation by ![]() around the axes
around the axes ![]() (i. e.
transformation
(i. e.
transformation
![]() ), which exchanges the
components of the complement.
), which exchanges the
components of the complement.
A connected surface decomposing
![]() into two handlebodies is
called a Heegaard surface. Heegaard surfaces are the most unknotted
surfaces among two-sided noncontractible connected surfaces. They may
be thought of as unknotted noncontractible surfaces.
into two handlebodies is
called a Heegaard surface. Heegaard surfaces are the most unknotted
surfaces among two-sided noncontractible connected surfaces. They may
be thought of as unknotted noncontractible surfaces.
If a connected surface ![]() is contractible in
is contractible in
![]() , then the
components
, then the
components ![]() and
and ![]() can be distinguished in the
following way: for one of them, say
can be distinguished in the
following way: for one of them, say ![]() , the inclusion homomorphism
, the inclusion homomorphism
![]() is trivial, while for the other one the
inclusion homomorphism
is trivial, while for the other one the
inclusion homomorphism
![]() is surjective. This
follows from the van Kampen theorem. The component with trivial
homomorphism is called the interior of the surface. It is
contractible in
is surjective. This
follows from the van Kampen theorem. The component with trivial
homomorphism is called the interior of the surface. It is
contractible in
![]() (in the same sense as the surface is).
(in the same sense as the surface is).
A contractible connected surface ![]() in
in
![]() is said to be
unknotted, if it is contained in some ball
is said to be
unknotted, if it is contained in some ball ![]() embedded into
embedded into
![]() and divides this ball into a ball with handles (which is the
interior of
and divides this ball into a ball with handles (which is the
interior of ![]() ) and a ball with handles with an open ball deleted.
Any two unknotted contractible surfaces of the same genus are ambiently
isotopic in
) and a ball with handles with an open ball deleted.
Any two unknotted contractible surfaces of the same genus are ambiently
isotopic in
![]() . Indeed, first the balls containing them can be
identified by an ambient isotopy (see, e. g., Hirsch [Hir-76],
Section 8.3), then it follows from uniqueness of Heegaard decomposition
of sphere that there is an orientation preserving homeomorphism of the
ball mapping one of the surfaces to the other. Any orientation
preserving homeomorphism of a 3-ball is isotopic to the identity.
. Indeed, first the balls containing them can be
identified by an ambient isotopy (see, e. g., Hirsch [Hir-76],
Section 8.3), then it follows from uniqueness of Heegaard decomposition
of sphere that there is an orientation preserving homeomorphism of the
ball mapping one of the surfaces to the other. Any orientation
preserving homeomorphism of a 3-ball is isotopic to the identity.
At most one component of a (closed) surface embedded in
![]() may be
one-sided. Indeed, a one-sided closed surface cannot be zero-homologous
in
may be
one-sided. Indeed, a one-sided closed surface cannot be zero-homologous
in
![]() and the self-intersection of its homology class (which is
the only nontrivial element of
and the self-intersection of its homology class (which is
the only nontrivial element of
![]() )
is the nonzero element of
)
is the nonzero element of
![]() .
Therefore any two one-sided surfaces in
.
Therefore any two one-sided surfaces in
![]() intersect.
intersect.
Moreover, if an embedded surface has a one-sided component, then
all other components are contractible. The contractible components are
naturally ordered: a contractible component of a surface can contain
other contractible component in its interior and this gives rise to a
partial order in the set of contractible components. If the interior of
contractible surface ![]() contains a surface
contains a surface ![]() , then one says that
, then one says that ![]() envelopes
envelopes ![]() .
.
The connected components of a surface embedded in
![]() divide
divide
![]() into connected regions. Let us construct a graph of adjacency
of these regions: assign a vertex to each of the regions and connect
two regions with an edge if the corresponding regions are adjacent to
the same connected two-sided component of the surface. Since the
projective space is connected and its fundamental group is finite, the
graph is contractible, i. e., it is a tree. It is called region
tree of the surface.
into connected regions. Let us construct a graph of adjacency
of these regions: assign a vertex to each of the regions and connect
two regions with an edge if the corresponding regions are adjacent to
the same connected two-sided component of the surface. Since the
projective space is connected and its fundamental group is finite, the
graph is contractible, i. e., it is a tree. It is called region
tree of the surface.
Consider now a (closed) surface without one-sided components. It may
contain several noncontractible components. They decompose the
projective space into connected domains, each of which is not
contractible in
![]() . Let us construct a graph of adjacency of
these domains: assign a vertex to each of the domains and connect two
vertices with an edge if the corresponding domains are adjacent. Edges
of the graph correspond to noncontractible components of the surface.
For the same reasons as above, this graph is contractible, i. e. it is
a tree. This tree is called the domain tree of the surface.
. Let us construct a graph of adjacency of
these domains: assign a vertex to each of the domains and connect two
vertices with an edge if the corresponding domains are adjacent. Edges
of the graph correspond to noncontractible components of the surface.
For the same reasons as above, this graph is contractible, i. e. it is
a tree. This tree is called the domain tree of the surface.
Contractible components of the surface are distributed in the domains.
Contractible components which are contained in different domains cannot
envelope one another. Contractible components of the surface which lie
in the same domain are partially ordered by enveloping. They divide
the domain into regions. Each domain contains only one region which is
not contractible in
![]() . If the domain does not coincide
with the whole
. If the domain does not coincide
with the whole
![]() (i.e., the surface does contain noncontractible
components), then this region can be characterized also as the only
region which is adjacent to all the noncontractible components of the
surface comprising the boundary of the domain. Indeed, contractible
components of the surface cannot separate noncontractible ones.
(i.e., the surface does contain noncontractible
components), then this region can be characterized also as the only
region which is adjacent to all the noncontractible components of the
surface comprising the boundary of the domain. Indeed, contractible
components of the surface cannot separate noncontractible ones.
The region tree of a surface contains a subtree isomorphic to the domain tree, since one can assign to each domain the unique noncontractible region contained in the domain and two domains are adjacent iff the noncontractible regions contained in them are adjacent. The complement of the noncontractible domains tree is a union of adjacency trees for contractible subdomains contained in each of the domains.
Let us summarize what can be said about topology of a spatial surface in the terms described above.
If a surface is one-sided (i. e., contains a one-sided component), then it is a disjoint sum of a projective plane with handles and several (maybe none) spheres with handles. Thus, it is homeomorphic to
All two-sided components are contractible and ordered by
enveloping. The order is easy to incorporate into the notation of the
topological type above. Namely, place notations for components
enveloped by a component ![]() immediately after
immediately after ![]() inside brackets
inside brackets
![]() . For example,
. For example,
If a surface is two-sided (i. e. does not contain a one-sided
component), then it is a disjoint sum
![]() of spheres with handles. To distinguish in notations the components
noncontractible in
of spheres with handles. To distinguish in notations the components
noncontractible in
![]() , we equip the corresponding symbols with
upper index 1. Although we do not make any difference between two
components of the complement of noncontractible connected surface (and
there are cases when they cannot be distinguished), in notations we
proceed as if one of the components is interior: the symbols denoting
components of the surface which lie in one of the components of the
complement of the noncontractible component
, we equip the corresponding symbols with
upper index 1. Although we do not make any difference between two
components of the complement of noncontractible connected surface (and
there are cases when they cannot be distinguished), in notations we
proceed as if one of the components is interior: the symbols denoting
components of the surface which lie in one of the components of the
complement of the noncontractible component ![]() are placed immediately
after the notation of
are placed immediately
after the notation of ![]() inside braces
inside braces ![]() . Our choice is the
matter of convenience. It correspond to the well-known fact that
usually, to describe a tree, one introduces a partial order on the set
of its vertices.
. Our choice is the
matter of convenience. It correspond to the well-known fact that
usually, to describe a tree, one introduces a partial order on the set
of its vertices.
In these notations,
This notation system is similar to notations used above to described isotopy types of curves in the projective plane. However, there is a fundamental difference: the notations for curves describe the isotopy type of a curve completely, while the notations for surfaces are far from being complete in this sense. Although topological type of the surface is described, knotting and linking of handles are completely ignored. In the case when there is no handle, the notation above does provide a complete description of isotopy type.